


R&S?SMW200A矢量信號(hào)發(fā)生器干涉式測(cè)向儀的輕松測(cè)試
R&S?射頻端口校準(zhǔn)軟件配合R&S?SMW-K545選件,可為校準(zhǔn)和對(duì)齊多臺(tái)耦合雙路徑或單路徑R&S?SMW200A矢量信號(hào)發(fā)生器的射頻端口之間的幅度、群延遲和相位提供標(biāo)準(zhǔn)且量身定制的解決方案。此外,R&S?脈沖序列器軟件支持用戶計(jì)算用于干涉儀測(cè)向(DF)測(cè)試案例所需的信號(hào)。結(jié)合上述軟件包與R&S?SMW200A信號(hào)發(fā)生器硬件,可實(shí)現(xiàn)精確的到達(dá)角(AoA)仿真,從而測(cè)試干涉儀測(cè)向器或輻射源定位系統(tǒng)的實(shí)際性能。

圖1:該圖展示了一種配備四個(gè)射頻端口的寬帶I/Q調(diào)制裝置,以及用于采集校正數(shù)據(jù)的矢量網(wǎng)絡(luò)分析儀和功率傳感器。R&S?射頻端口校準(zhǔn)軟件可輕松實(shí)現(xiàn)射頻端口間信號(hào)的精確對(duì)齊。它可在用戶定義的參考平面上補(bǔ)償射頻端口之間的幅度、群延遲和相位偏移。R&S?脈沖序列器軟件支持通過(guò)簡(jiǎn)單直觀的圖形用戶界面定義AoA測(cè)試用例。
您的任務(wù)
許多現(xiàn)代軍用飛機(jī)在其自衛(wèi)系統(tǒng)中都配備了先進(jìn)的電子支援措施(ESM)。ESM系統(tǒng)通常采用干涉儀測(cè)向儀來(lái)確定輻射源信號(hào)的到達(dá)角。與早期僅基于幅度的測(cè)向技術(shù)的簡(jiǎn)單雷達(dá)告警接收機(jī)相比,這些先進(jìn)系統(tǒng)能夠以更高的精度定位輻射源。此外,干涉儀測(cè)向儀能夠更好地應(yīng)對(duì)來(lái)自多個(gè)發(fā)射源的信號(hào)同時(shí)到達(dá)的情況。
干涉測(cè)量測(cè)向利用了這樣一個(gè)事實(shí):入射到天線陣列的信號(hào)在每個(gè)陣元上都會(huì)產(chǎn)生不同的相位偏移。可采用多種算法來(lái)非常精確地確定到達(dá)角(AoA)。
一種AoA模擬器需要足夠靈活,既能提供用于早期硬件驗(yàn)證的簡(jiǎn)單雷達(dá)脈沖,也能提供用于系統(tǒng)級(jí)測(cè)試的復(fù)雜多發(fā)射機(jī)場(chǎng)景。
如果工程師能夠在實(shí)驗(yàn)室中輕松生成多種信號(hào),以針對(duì)各種發(fā)射機(jī)場(chǎng)景驗(yàn)證被測(cè)設(shè)備的性能,那么開發(fā)和測(cè)試定向儀的任務(wù)將大大簡(jiǎn)化。
理想情況下,模擬器硬件應(yīng)采用現(xiàn)成的商業(yè)解決方案(COTS),從而無(wú)需再設(shè)計(jì)昂貴且缺乏靈活性的定制硬件。為了實(shí)現(xiàn)對(duì)AoA仿真最精確的信號(hào)生成,測(cè)試裝置應(yīng)提供一種用戶友好的選項(xiàng),以便在指定參考平面上精確對(duì)齊射頻端口之間的幅度、群延遲和相位。
定義信號(hào)和創(chuàng)建復(fù)雜場(chǎng)景也必須簡(jiǎn)單易行,避免耗費(fèi)大量時(shí)間編寫額外的仿真軟件。

圖2:此設(shè)置適用于使用兩個(gè)耦合的雙路徑R&S?SMW200A矢量信號(hào)發(fā)生器,模擬多個(gè)發(fā)射源的到達(dá)角(AoA)。R&S?脈沖序列軟件可自動(dòng)計(jì)算射頻端口的相對(duì)群時(shí)延、相對(duì)相位或相對(duì)幅度值。
羅德與施瓦茨解決方案
R&S?SMW200A矢量信號(hào)發(fā)生器可提供兩條高達(dá)44 GHz的射頻通道。多個(gè)R&S?SMW200A發(fā)生器可進(jìn)行級(jí)聯(lián),組成一款緊湊且可擴(kuò)展的仿真器,以生成相位相干的射頻信號(hào)。
為實(shí)現(xiàn)所有射頻路徑之間的相位相干性,R&S?SMW200A信號(hào)發(fā)生器中的所有I/Q調(diào)制器必須使用相同的本振(LO)信號(hào)。為此,可將主R&S?SMW200A內(nèi)部的本振信號(hào)以菊花鏈方式分配至所有從屬R&S?SMW200A信號(hào)發(fā)生器。或者,LO信號(hào)也可由外部源提供,例如R&S?SMA100B,并以星型拓?fù)浣Y(jié)構(gòu)分配至R&S?SMW200A發(fā)生器,以實(shí)現(xiàn)最佳的對(duì)稱性配置。此外,各發(fā)生器之間還共享內(nèi)部時(shí)鐘和觸發(fā)信號(hào),以確保同步運(yùn)行。
R&S?射頻端口校準(zhǔn)軟件配合R&S?SMW-K545選件,可讓模擬器設(shè)置的復(fù)雜校準(zhǔn)工作變得極為簡(jiǎn)單。用戶可通過(guò)網(wǎng)頁(yè)GUI訪問(wèn)多射頻端口設(shè)置的校準(zhǔn)程序。用戶只需配置好設(shè)置,定義好電纜、耦合器等即可。對(duì)于去嵌入處理,請(qǐng)將每個(gè)射頻輸出連接至矢量網(wǎng)絡(luò)分析儀,例如R&S?ZNA或R&S?ZNB,然后啟動(dòng)校準(zhǔn)。R&S?射頻端口校準(zhǔn)軟件會(huì)自動(dòng)采集校正數(shù)據(jù),以在用戶定義的參考平面上對(duì)射頻路徑進(jìn)行幅度、群延遲和相位(同時(shí)涵蓋整個(gè)I/Q調(diào)制帶寬)的校準(zhǔn)。
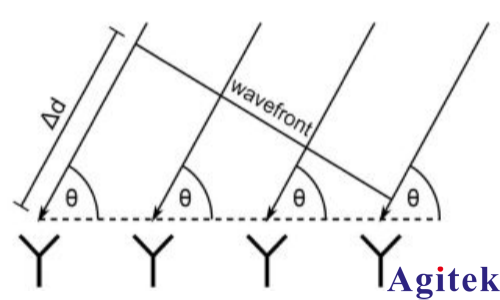
圖3:示意圖,說(shuō)明入射角theta如何導(dǎo)致DF天線陣列產(chǎn)生不同的相位偏移。
評(píng)估不同測(cè)向算法
開發(fā)過(guò)程中典型的測(cè)試用例是評(píng)估和比較不同的DF算法。相關(guān)的比較標(biāo)準(zhǔn)包括:例如,某種算法可達(dá)到的角度分辨率,以及信噪比對(duì)特定算法所獲DF精度的影響。以下描述了一個(gè)使用線性四通道天線陣列測(cè)試DF接收機(jī)的示例場(chǎng)景。
圖3示出了線性DF天線陣列的工作原理。當(dāng)波前以角度Θ入射到陣列時(shí),由于發(fā)射源與各天線單元之間的距離不同,每個(gè)天線單元接收到的信號(hào)都會(huì)相對(duì)于其他單元產(chǎn)生相位偏移。圖3顯示了數(shù)組中第一個(gè)與最后一個(gè)元素之間距離的差值,記為Δd。隨后,可通過(guò)DF算法評(píng)估天線單元之間的相位偏移,從而確定入射信號(hào)的確切到達(dá)角(AoA)。
本示例的測(cè)試設(shè)置由兩臺(tái)耦合的雙路徑R&S?SMW200A組成,可提供如圖2所示的四個(gè)相位相干信號(hào)。在使用R&S?脈沖序列軟件定義場(chǎng)景時(shí),DF天線陣列的四個(gè)單元分別被分配至R&S?SMW200A發(fā)生器的四個(gè)端口之一。然后,每個(gè)發(fā)生器的射頻端口均連接至DF接收機(jī)(被測(cè)設(shè)備)的相應(yīng)射頻輸入端。在儀器上運(yùn)行該場(chǎng)景時(shí),所有必要的幅度、群延遲和相位校正系數(shù)都會(huì)自動(dòng)應(yīng)用,以確保四個(gè)信號(hào)在DF接收機(jī)的射頻輸入端具有所需的相位關(guān)系。R&S?脈沖序列器軟件可計(jì)算DF接收機(jī)射頻輸入端口處預(yù)期的信號(hào)。不同的場(chǎng)景可針對(duì)各種需求評(píng)估DF接收機(jī)的性能。
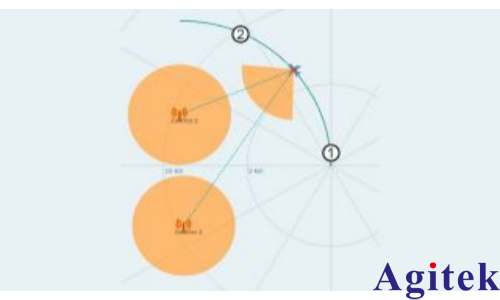
圖4:使用R&S?脈沖序列器軟件配置的測(cè)向場(chǎng)景預(yù)覽。在本示例中,飛機(jī)沿圓形軌跡逆時(shí)針飛行,并經(jīng)過(guò)位置(1)和位置(2)。上述示例中所描述的測(cè)向接收機(jī)的線性天線陣列假定位于飛機(jī)機(jī)翼或機(jī)身內(nèi)用戶自定義的某個(gè)位置。
示例用例
以下示例展示了如何將R&S?脈沖序列器軟件與經(jīng)過(guò)校準(zhǔn)的仿真器設(shè)置配合使用,以在同一DF場(chǎng)景中評(píng)估兩種不同DF算法的性能。在本示例中,采用了真實(shí)的射頻DF硬件和真實(shí)的射頻信號(hào)。
示例DF場(chǎng)景
一架飛機(jī)沿圓形軌跡繞著兩個(gè)輻射源飛行(參見(jiàn)圖4中的場(chǎng)景)。該飛機(jī)搭載了一個(gè)四元件線性天線陣列,天線陣列側(cè)向指向,用于確定兩個(gè)輻射源信號(hào)的到達(dá)角。隨著飛機(jī)沿其軌跡飛行,這兩個(gè)輻射源之間的到達(dá)角差逐漸減小,使得兩個(gè)角度之間的區(qū)分變得愈加困難。
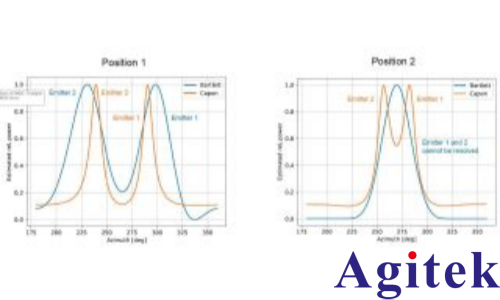
圖5:不同位置的DF結(jié)果
AoA估計(jì)由DF接收機(jī)處理單元中內(nèi)置的DF算法執(zhí)行。作為示例,應(yīng)用了兩種不同的算法(巴特利特和卡彭),并對(duì)其在DF場(chǎng)景下的理論性能進(jìn)行了評(píng)估。圖。圖5顯示了兩種算法在搭載測(cè)向接收機(jī)(DUT)的飛機(jī)不同位置上所給出的角度估計(jì)結(jié)果。第一個(gè)方位角是在軌跡上的位置(1)處測(cè)得的,此時(shí)入射角差異仍較大。兩種算法均能準(zhǔn)確區(qū)分發(fā)射源1和發(fā)射源2,并給出了精確的估計(jì)結(jié)果。第二張圖顯示了位置(2)的測(cè)試結(jié)果。結(jié)果顯示,只有Capon算法仍能提供準(zhǔn)確的方位估計(jì),而Bartlett算法則無(wú)法分辨各個(gè)輻射源。這種估計(jì)僅考慮了相位信息,未涉及其他任何輻射源特征。
此外,還可針對(duì)兩種DOA算法評(píng)估DF精度(即模擬值與估計(jì)值之間的差異)。下表提供了模擬值與估計(jì)值的對(duì)比:
模擬方位角 | 巴特利特 | 卡彭 | |||
發(fā)射器1 | 發(fā)射器2 | 發(fā)射器1 | 發(fā)射器2 | 發(fā)射器1 | 發(fā)射器2 |
290.0° | 240.0° | 298.3° | 230.6° | 290.4° | 239.5° |
280.0° | 260.0° | 未提供 | 未提供 | 283.3° | 257.4° |
這一理論示例清晰地展示了不同DF算法如何處理同一場(chǎng)景,它充分表明,在開發(fā)過(guò)程中盡早開展系統(tǒng)測(cè)試——包括射頻硬件和相關(guān)DF處理算法——至關(guān)重要。
羅德與施瓦茨的DF場(chǎng)景模擬器
R&S?脈沖序列器軟件與多臺(tái)耦合且已校準(zhǔn)的R&S?SMW200A信號(hào)發(fā)生器相結(jié)合,可提供強(qiáng)大的場(chǎng)景仿真功能,從而只需付出相對(duì)較少的努力,即可模擬并生成大量相關(guān)的DF場(chǎng)景及真實(shí)射頻信號(hào)。
這使得能夠針對(duì)各種威脅場(chǎng)景對(duì)測(cè)向儀進(jìn)行準(zhǔn)確表征。DF場(chǎng)景模擬的靈活性使R&S?SMW200A配合相關(guān)軟件包成為執(zhí)行此項(xiàng)任務(wù)的理想解決方案。
主要優(yōu)勢(shì)
緊湊且可擴(kuò)展的多通道信號(hào)發(fā)生器設(shè)置
在用戶定義的參考平面上,對(duì)多個(gè)射頻端口之間的幅度、群延遲和相位進(jìn)行高精度、易于操作的校準(zhǔn)
使用多個(gè)發(fā)射器/干擾器快速靈活地生成場(chǎng)景
具有2 GHz調(diào)制帶寬,信號(hào)精度高
6自由度(DoF)運(yùn)動(dòng)的模擬
多個(gè)同時(shí)發(fā)射器的模擬




 關(guān)注官方微信
關(guān)注官方微信
