


矢量信號發生器R&S?SMW200A干涉式測向儀的輕松測試
R&S?射頻端口校準軟件配合R&S?SMW-K545選件,可為校準和對齊多臺耦合雙路徑或單路徑R&S?SMW200A矢量信號發生器的射頻端口之間的幅度、群延遲和相位提供標準且量身定制的解決方案。此外,R&S?脈沖序列器軟件支持用戶計算用于干涉儀測向(DF)測試案例所需的信號。結合上述軟件包與R&S?SMW200A信號發生器硬件,可實現精確的到達角(AoA)仿真,從而測試干涉儀測向儀或輻射源定位系統的實際性能。

圖1:該圖展示了一種配備四個射頻端口的裝置,用于寬帶I/Q調制;同時配備矢量網絡分析儀和功率傳感器,以采集校正數據。R&S?射頻端口校準軟件可輕松實現射頻端口間信號的精確對齊。它可在用戶定義的參考平面上補償射頻端口之間的幅度、群延遲和相位偏移。R&S?脈沖序列器軟件支持通過簡單直觀的圖形用戶界面定義AoA測試用例。
您的任務
許多現代軍用飛機在其自衛系統中都配備了先進的電子支援措施(ESM)。ESM系統通常采用干涉儀測向儀來確定輻射源信號的到達角。與早期僅基于幅度的測向技術的簡單雷達告警接收機相比,這些先進系統能夠以更高的精度定位輻射源。此外,干涉儀測向儀能夠更好地應對來自多個發射源的信號同時到達的情況。
干涉測量測向利用了這樣一個事實:入射到天線陣列的信號在每個陣元上都會產生不同的相位偏移。可采用多種算法來非常精確地確定到達角(AoA)。
一種AoA模擬器需要足夠靈活,既能提供用于早期硬件驗證的簡單雷達脈沖,也能提供用于系統級測試的復雜多發射源場景。
如果工程師能夠在實驗室中輕松生成多種信號,以針對各種發射機場景驗證被測設備的性能,那么開發和測試定向儀的任務將大大簡化。
理想情況下,模擬器硬件應采用現成的商業解決方案(COTS),從而無需再設計昂貴且缺乏靈活性的定制硬件。為了實現對AoA仿真最精確的信號生成,測試裝置應提供一種用戶友好的選項,以便在指定參考平面上精確對齊射頻端口之間的幅度、群延遲和相位。
定義信號和創建復雜場景也必須簡單易行,避免耗費大量時間編寫額外的仿真軟件。

圖2:此設置適用于使用兩臺耦合的雙路徑R&S?SMW200A矢量信號發生器,模擬多個發射源的到達角(AoA)。R&S?脈沖序列軟件可自動計算射頻端口的相對群時延、相對相位或相對幅度值。
羅德與施瓦茨解決方案
R&S?SMW200A矢量信號發生器可提供兩條高達44 GHz的射頻通道。多個R&S?SMW200A發生器可進行耦合,組成一款緊湊且可擴展的仿真器,以生成相位相干的射頻信號。
為實現所有射頻路徑之間的相位一致性,R&S?SMW200A信號源中的所有I/Q調制器必須使用相同的本振(LO)信號。為此,可將主R&S?SMW200A內部的本振信號以菊花鏈方式分配至所有從屬R&S?SMW200A信號源。或者,LO信號也可由外部源(如R&S?SMA100B)提供,并以星型拓撲結構分配至R&S?SMW200A發生器,以實現最佳的對稱性配置。此外,各發生器之間還共享內部時鐘和觸發信號,以確保同步運行。
R&S?射頻端口校準軟件配合R&S?SMW-K545選件,可將模擬器設置的復雜校準任務變得極為簡單。用戶可通過網頁GUI訪問多射頻端口設置的校準程序。用戶只需配置好設置,定義好電纜、耦合器等即可。對于去嵌入處理,請將每個射頻輸出連接至矢量網絡分析儀,例如R&S?ZNA或R&S?ZNB,然后啟動校準。R&S?射頻端口校準軟件會自動采集校正數據,以在用戶定義的參考平面上對射頻路徑進行幅度、群延遲和相位(同時涵蓋整個I/Q調制帶寬)的校準。
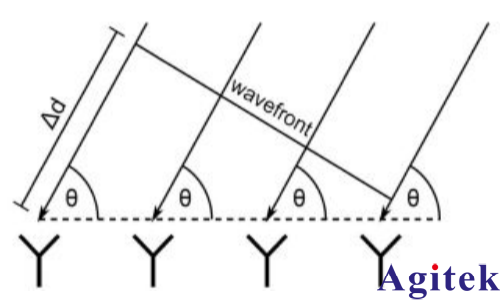
圖3:示意圖,說明入射角theta如何導致DF天線陣列中產生不同的相位偏移。
評估不同的測向算法
開發過程中典型的測試用例是評估和比較不同的DF算法。相關的比較標準包括:例如,某種算法可達到的角度分辨率,以及信噪比對特定算法所得DF精度的影響。以下描述了一個使用線性四通道天線陣列測試DF接收機的示例場景。
圖3示出了線性DF天線陣列的工作原理。當波前以角度Θ入射到陣列時,由于發射源與各天線單元之間的距離不同,每個天線單元接收到的信號都會相對于其他單元產生相位偏移。圖3顯示了數組中第一個與最后一個元素之間距離的差值,記為Δd。隨后,可利用DF算法評估天線單元之間的相位偏移,從而確定入射信號的確切到達角(AoA)。
本示例的測試設置由兩臺耦合的雙路徑R&S?SMW200A組成,可提供如圖2所示的四路相位相干信號。在使用R&S?脈沖序列軟件定義場景時,DF天線陣列的四個單元分別被分配至R&S?SMW200A發生器的四個端口之一。然后,每個發生器的射頻端口均連接至DF接收機(被測設備)的相應射頻輸入端。在儀器上運行該場景時,所有必要的幅度、群延遲和相位校正系數都會自動應用,以確保四個信號在DF接收機的射頻輸入端具有所需的相位關系。R&S?脈沖序列器軟件可計算DF接收機射頻輸入端口預期的信號。不同的場景可針對各種需求評估DF接收機的性能。

圖4:使用R&S?脈沖序列器軟件配置的測向場景預覽。在本示例中,飛機沿圓形軌跡逆時針飛行,并經過位置(1)和(2)。上述示例中所描述的測向接收機的線性天線陣列假定位于飛機機翼或機身內用戶自定義的某個位置。示例用例
以下示例展示了如何將R&S?脈沖序列器軟件與經校準的仿真器設置配合使用,以在同一DF場景中評估兩種不同DF算法的性能。在本示例中,采用了真實的射頻DF硬件和真實的射頻信號。
示例DF場景
一架飛機沿圓形軌跡繞著兩個輻射源飛行(參見圖4中的場景)。該飛機搭載了一個四元件線性天線陣列,天線陣列側向指向,用于確定兩個輻射源信號的到達角。隨著飛機沿其軌跡飛行,這兩個輻射源之間的到達角差異逐漸減小,使得兩個角度越來越難以區分。
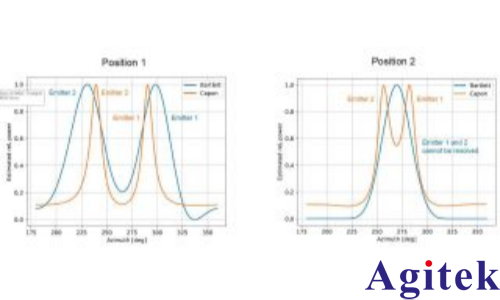
圖5:不同位置的DF結果
方向角估計由DF接收機處理單元中內置的DF算法執行。作為示例,應用了兩種不同的算法(巴特利特和卡彭),并對其在DF場景下的理論性能進行了評估。圖5顯示了在搭載測向接收機(DUT)的飛機不同位置時,兩種算法所給出的角度估計結果。第一個方位角是在軌跡上的位置(1)處測得的,此時入射角差異仍較大。兩種算法均能區分發射源1和發射源2,并且結果準確。第二張圖展示了位置(2)的測試結果。結果顯示,只有Capon算法仍能提供準確的方位估計,而Bartlett算法則無法分辨這些發射源。此估算僅考慮了相位信息,未涉及其他發射器特性。
此外,還可針對兩種DOA算法評估DF精度(即模擬值與估計值之間的差異)。下表提供了模擬值與估計值的對比:
模擬方位角 | 巴特利特 | 卡彭 | |||
發射器1 | 發射器2 | 發射器1 | 發射器2 | 發射器1 | 發射器2 |
290.0° | 240.0° | 298.3° | 230.6° | 290.4° | 239.5° |
280.0° | 260.0° | 未提供 | 未提供 | 283.3° | 257.4° |
這一理論示例清晰地展示了不同DF算法如何處理同一場景,它充分表明,在開發過程中盡早開展系統測試——包括射頻硬件和相關DF處理算法——至關重要。
羅德與施瓦茨的DF場景模擬器
R&S?脈沖序列器軟件與多臺耦合且已校準的R&S?SMW200A信號發生器相結合,可提供強大的場景仿真功能,從而只需付出相對較少的努力,即可模擬并生成大量相關的DF場景及真實射頻信號。
這使得能夠針對各種威脅場景對測向儀進行精確表征。DF場景模擬的靈活性使R&S?SMW200A配合相關軟件包成為執行此項任務的理想解決方案。
主要優勢
緊湊且可擴展的多通道信號發生器配置
在用戶自定義參考平面上,對多個射頻端口之間的幅度、群延遲和相位進行高精度、易于操作的校準
使用多個發射器/干擾源快速靈活地生成場景
具備2 GHz調制帶寬,信號精度高
模擬6個自由度(DoF)運動
模擬多個同時發射器




 關注官方微信
關注官方微信
